LeCun亲授的深度学习入门课:从飞行器的发明到卷积神经网络
本站寻求有缘人接手,详细了解请联系站长QQ1493399855

Root 编译整理
量子位 出品 | 公众号 QbitAI
深度学习和人脑有什么关系?计算机是如何识别各种物体的?我们怎样构建人工大脑?
这是深度学习入门者绕不过的几个问题。很幸运,这里有位大牛很乐意为你讲解。
2月6日,UCLA(加州大学洛杉矶分校)与纯数学与应用数学研究所(IPAM)跨界组织主办的论坛上,“卷积神经网络之父”Yann LeCun操着一口浓重的法国口音,给数学界的科学家们介绍了深度学习。
LeCun从鸟类对飞行器发明的影响开始讲起,层层递进、逐步深入到深度学习的本质,可以说非常新手友好了。
机不可失,还不来围观这堂由大神亲自授课的深度学习入门指南?
快去搬凳抢座!
首先搬运了全程视频(当然,是生肉):
class="video_iframe" data-vidtype="2" allowfullscreen="" frameborder="0" data-ratio="1.7647058823529411" data-w="480" scrolling="no" data-src="http://v.qq.com/iframe/player.html?vid=j0554ksial2&width=670&height=376.875&auto=0" style="display: none; width: 670px !important; height: 376.875px !important;" width="670" height="376.875" data-vh="376.875" data-vw="670"/>
当然,还整理了讲座的主要内容:
今天在座的都是数学大神。
我呢,既不是数学家,也没拿诺贝尔奖。感觉站这儿份量不太够。
以前专业是工程学,不过炸过一些东西,后来就转软件了(不然世界怎么样就不好说了)。
今天来,给大家简单介绍一下深度学习。
但我们不从AI开始讲起,而是从人类发明飞行器开始讲。
依照达芬奇飞行器草图做的第一款飞行器,完全照搬了鸟类的外形。那时候根本不知道飞行底层的原理,所以只能从自然界的生物获得灵感,照葫芦画瓢。
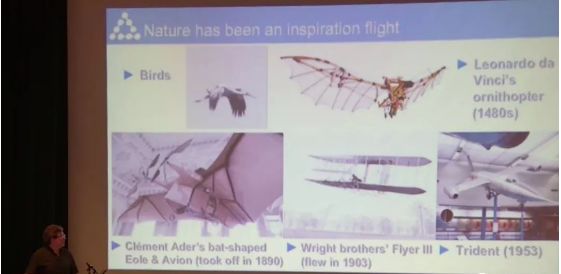
第一次飞行,只成功离地15公分,还是20公分的样子,飞行器就挂了。所以我们还是需要更系统的方法,就是后来莱特兄弟造飞行器用到的一套方法,飞行终于成为了现实。
一般来说,理论认知都是在实践积累之后才有的。
飞行就说这么多。
那么问题来了。
人工智能可以从大自然里获得灵感吗?
很明显,这个想法很旧啦。我们先看一下生物界的智能体。
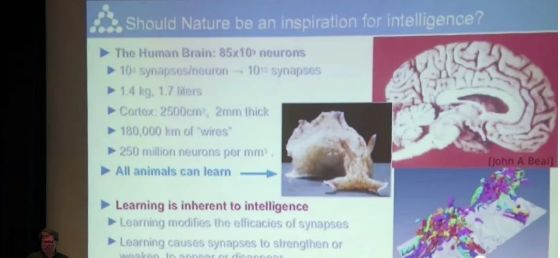
人类的大脑,差不多有850亿个神经元。而每个神经元都有上万个突触,在一千到十万个之间不等。人脑相当高效,能耗才25瓦特,是PC的十分之一。
每个有大脑的动物都能学习,不同动物的学习方式可能不同,有些比较简单。它们并不需要特别好的视觉,或者其他智能体的教导,就能自己去学。
我们尝试找出动物学习的机制,然后用来训练机器学习。
慢慢地,从1940年起,就有了打造智能机器的想法。于是就冒出来了感知机(Perceptron)。
它不是一台计算机,而是一个计算机模拟器。输入值是电压,超过某个阈值,就打开。低于阈值,就关闭。而权重是可以被训练的,就像一个可旋转调节的钮。
尽管现在我们可以用三行Python代码实现它,但在那年代已经算是大型的计算机了。
这个感知机是怎么运转起来的呢?
原理是很简单的,你需要先集齐一堆训练数据。
比如说任务是图像识别,那么输入就是图像的一个个像素。当每个像素用0,1表示时,那么就可以组成一串数字。
你给机器一张图,字母A,然后输出应该是1。那么训练的时候,就读取图像中的像素,调高那些能增强最终结果是1,也就是判定字母是A的像素的权重,并调低偏离最终结果的像素的权重。
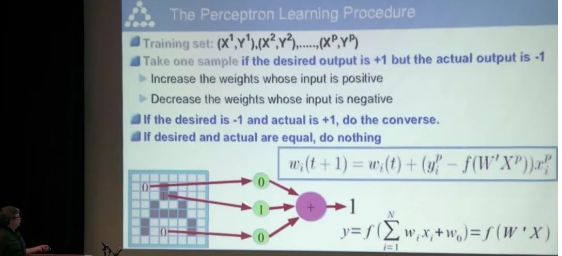
数学上只需要一行Python代码就可以搞定。
事实上,虽然这个办法是直觉上想出来的,但后来几年发现这个问题可以总结成几个方程,也是受到了生物学的启发。
我们回到人的大脑是怎么学习的。
每个神经元是通过突触来连接其他神经元,从而传递信号。
但数学上,这个概念被简化了,将感知机里的权重看成一个个的旋钮。
对于具体的输入,根据输出的错误再调参数,训练,重复,直到目标函数的值越来越小(目标函数的值,表示的是你得到的输出和你想要的输出的差值)。
这叫做梯度下降(gradient descent),依然是很简单的数学问题。
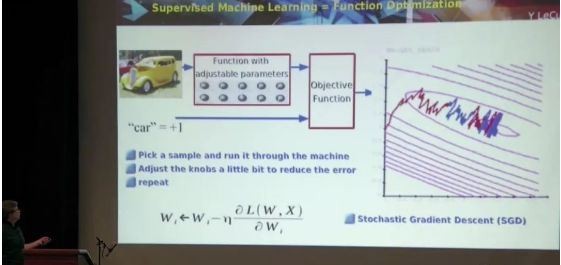
举个稍微复杂一点的例子,我们要做一个图片分类器,辨识汽车、飞机、椅子等物体。
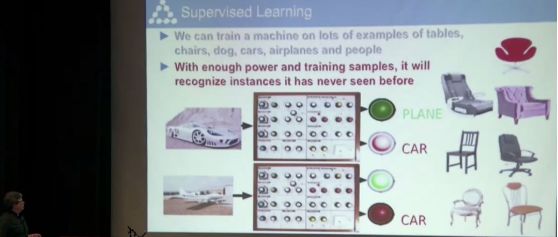
它们的外观千变万化,我们怎样让计算机认出每一类物体呢?
这需要依赖大量的手动调整。给系统一张车的照片,如果系统将它认成车,红灯亮起。如果红灯不亮,就调整这些按钮,让红灯的亮度增强;输入飞机的图片,调整按钮,让绿灯亮度增强。
输入足够多的训练数据不停调整按钮,直到机器能够辨认出来它从来没见过的相片为止,那么就算训练成功了。
你们肯定会问,这个能识别图像的神秘盒子里到底装了什么?
这个答案,在过去的几十年里,一直在变。
传统的模式识别,是给它一张图,然后过一个特征提取器。这个特征提取器是人工搭建的,把这些图像的像素变成一串数字,然后用简单的算法吸收消化,得到这张图的内容。这种方法在深度学习出现以前一直都在用。
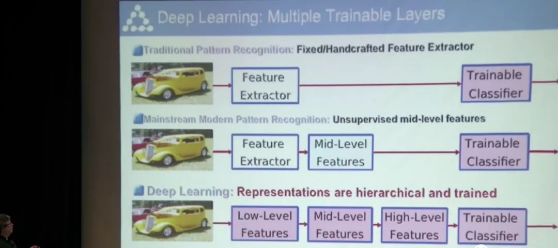
而深度学习是把模块分成可以被训练的好几层。就像视觉信号的传递一样,需要多步来提取信息。
下一个我们要问的问题是,我们应该往这些可训练的模块箱里放什么东西?
“多层”的概念是50年代提出的,到80年代时用的人稍微多了起来。
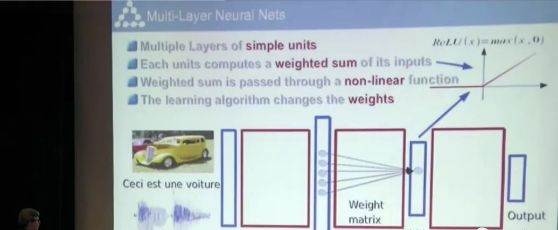
每一层都是由简单的单元组成,而单元又是基于上一层的输入,经过不同程度的权重处理得到的。然后如果值超过阈值,就继续往下走,低于阈值就不取。
那么,我们要如何训练机器呢?
这其实是不断调小偏差的过程。问题的关键在于往什么方向调整参数、调整到什么程度,才可以拿到我们想要的输出。
1980年,这个问题才有了解决方案。
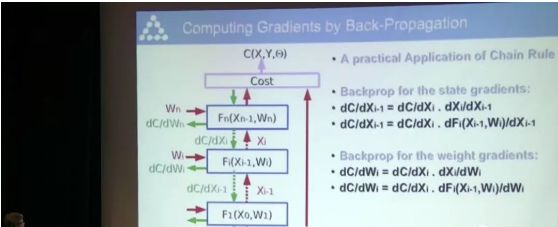
这个方案是一个复杂的数学概念的实际应用, 叫链式法则(Chain rule)。
当你有一个网络的时候, 你有的是连续的功能区块(Functional block)。
每一个区块或者做矩阵乘法,或者是给每个输入做一个非线性的运算。我们来看看系统之中分离出来的一个区块。
你可以简单地算出来输出值。比如说这是一个线性的矩阵乘法模块,参数乘以向量,这样你就能拿到输出的向量。这两个区块有不一样的维度。
现在假设,对于每个向量中任何元素的调整,我们都知道损失会往什么方向变化。
损失函数的斜率,表示的是我们得到的输出和我们想要输出的差值。通过计算,可以得出图中绿色的向量,从上到下计算一个递归公式,通过反向传播,就能得到cost和所有模块相关的梯度。
很多现在的平台,在你写程序定义网络后,都可以自动运行反向传播,计算梯度。
这些问题都解决了之后呢,我们就可以建一个人工的大脑了吗?
要知道,人脑每秒可以做10的17次方的运算,神经元数量达到10的11次方。
我们来看一款运算速度很快的芯片。右下角的英伟达Titan-V,这个GPU每秒可做10的15次方运算,比人脑要慢100倍。
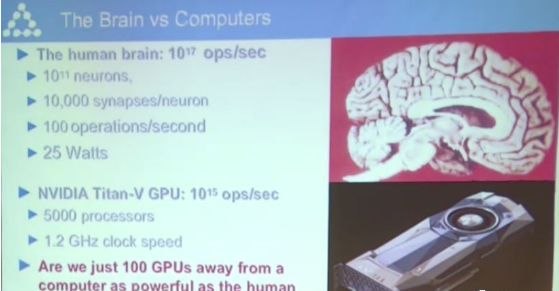
所以大家算算,即使芯片的速度翻一倍要18个月的话,那还要多长时间能达到和我们人脑一样?如果要让芯片在合理的大小范围的话,我认为我们还要等多几十年。
但这个不是主要问题。主要问题是我们不知道怎么编程它们、怎么训练它们、训练原则是什么。
这个GPU很便宜,才3000刀,但是现在大家都在买来挖矿,所以已经买不到了。
我说过很多次了,如果在我职业生涯中,能够造一个智能体,像大鼠一样具有常识,我会感到很开心很满足。我们现在也许有相应的算力了,但我们还没有搞清楚潜在原则。现在是这个底层原理限制住了。
好啦,现在我们来跳出来看看生物还有没有给我们别的启发。
Hubel & Wiesel 1962这个生物研究工作太有名了,大家都知道的,是70年代拿了诺贝尔奖的。工作本身是在60年代做的,是视觉信号传递的生理结构。
简单的细胞检测位置信息,复杂的细胞整合简单细胞受到刺激的信息。
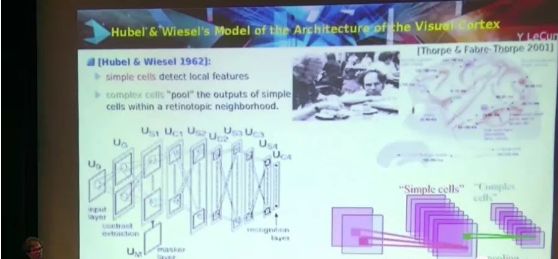
所以,如果有一个特殊的动机,稍微移动一点,复杂细胞都会被激活。
Fukushima 1982年造了一个计算模型,就是描述简单细胞和复杂细胞之间的层级关系。这个是80年代的工作,那时候还没有合适的学习算法。所以用了其他的非监督型算法。
后来,我受到这个算法启发,造了一个含有相似构造的网络,用反向传播算法来训练,就是我们平时说的卷积神经网络(CNN)。
下面是卷积神经网络的示意图。
图像中的像素会激活CNN中的单元。但我不敢称他们为神经元,不然神经科学家会不爽。因为比起神经元来说,这些单元实在是太简单了。
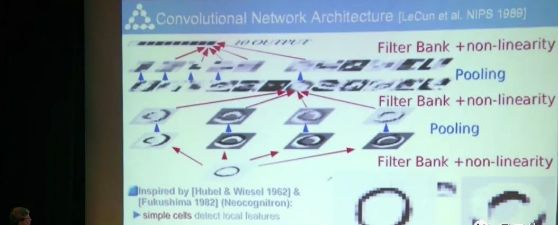
每个单元,看起来像patch。这些单元会和阈值比,比他们高,就打开。低的话就关上。
可以看到这个用激光笔指出的patch是系数。
左边这个是输入patch,把系数向量和输入向量乘在一起。用系数把整个输入刷一遍,然后你记录就能得到右边的结果。
如果它们能够匹配的话,就得到高度激活的结果,不匹配就得到非激活的结果。
这在数学上就叫做离散型卷积。
经过了层层卷积核的系数处理,最后得到的是最右边的压缩过的信息。
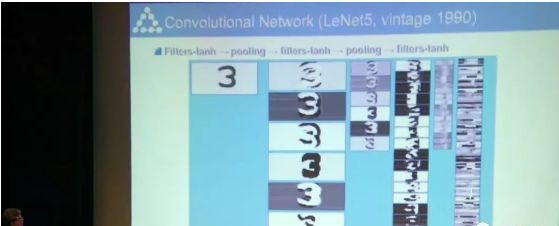
我们90年代中期的时候弄了一个很牛的模型。不仅能够认出来一个字母,还能认出多个字母,还不用先分割开。当时如果用经典数学算法就必须先分割。
等到无法从图像中分割出物体时,我们模型的重要性就显现出来了。
这个模型中每一层都是卷积的,同时进行分割和识别。
这是那个时候年轻的我,把一张纸条放在一个摄像头下面,然后按一下键盘。这是1993年的时候(嘴上说的是1992年)。
这是我在新泽西的时候贝尔实验室那会儿的电话号码,现在已经不用了。
在几秒钟之内,就可以处理图像,识别出数字。
训练数据量不用很多,哪怕是很小的、不同的手写体,都能识别成这样,效果很不错了。
为了以合适的速度跑起来这个程序,我们用了特殊的硬件DSP 32C,速度可到 20 FLOPS。最后,我们用这个造了一个可以识别支票的系统。于1996年左右开始铺开使用。
到90年代末,这套系统已经在处理10%到20%左右的支票了。如果你够老的话,也许你的支票被这套系统读取过。
这么看,这套系统还是挺成功的。可惜在90年代中期,在机器学习圈里,大家对神经网络的热情消失了。
很大一个原因是,这套系统需要大量的计算力投入才软件系统里。这样才有可能跑起来。
这一切都发生在MATLAB、微软系统、Linux出现之前,AT&T都还没公开相应的硬件资源。没有大型计算机,或大型数据集,大家做这个都只能靠直觉。
其实在那个时候,很多东西都很玄学,我们并不能从数学的角度去解释他们。
不能解释背后的原理的话,就没办法形成一套理论。没有理论就很混乱,都发不了文章。
哪怕事实上,这些方法是可用的,但是也被抛弃了。
不过我们当中的某些人,知道,这方法最终还是会回来的。因为在某些情况下,这套方法是更好的。
因为它们会自己学习,不仅仅是识别图像,还能够抽象地表示这个世界。它们能够找到事物的本质,然后找到不同部分之间的联系,然后组装成以个整体。它们做的事情很强大,所以也需要更多的数据。
在1996年和2002年之间,我几乎停止了这方面的研究,改做图像压缩。
2003年的时候我又开始搞回这个了。我们做了一辆有两个摄像头小车,让人来控制它,当距离障碍物2米的时候,我们会控制它向左转或向右转来避开障碍物。然后,我们训练一个CNN来看两个摄像头采到的画面,去预测方向盘转向的角度。
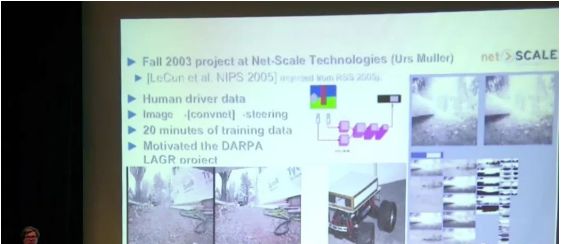
只需要20分钟的训练数据,这个CNN就可以自己开车了!遇到障碍物的时候,它会自行转向避开。
在这套系统的启发下,DARPA举办了LAGR(Learning Applied to Ground Vehicles),一个150万美元的项目。
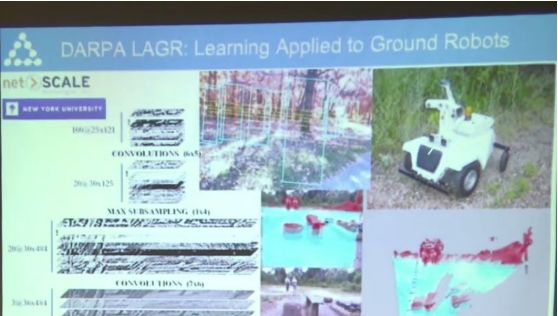
你可以看到这个机器人有四个摄像头,内部装了三台计算机,可以在自然环境中自动行驶。我们训练了一个CNN,让它告诉我们在画面上,哪些区域是可以顺利通过的。
使用传统的立体视觉成像技术,也能实现这个功能。但是,立体成像很贵,工作范围也很有限,大概能做到10米的距离。
这就是CNN的一种用途。
很快我们就意识到,不能只是标记一个区域能不能通过,更有意思的是,看图中的某些像素属于哪个物体。(物体识别分类)。
举个例子来说,这些是天,树,窗,路等等。
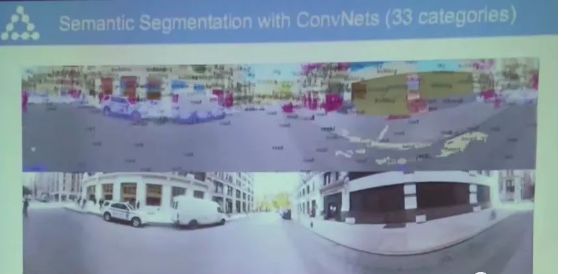
这是有人骑着自行车上路拍到的第一人称视角画面,这个算法不能说完美,它认为这里是沙漠,实际上在曼哈顿不可能有沙漠。
不过,它识别行人等主要目标的能力都不错,而且即使在普通电脑上跑,也比当时最领先的系统快100倍。这个算法让很多人产生了灵感,认为我们能把它用到无人驾驶上。
2014年,有两个公司很快就把这个技术拿过去用了。一个是MobilEye,另一个是Nvidia。

2010年之前,这些研究都在低调地进行着,后来,事情有了变化。
2011年的时候,深度学习在语音识别上有了重大的进展。
在2012年年底,深度学习在ImageNet比赛上一举成名。ImageNet数据集包含1000类物体的130万张照片,传统图像分类算法在这个数据集上取得的最低错误率大约是26%。
2012年,一个多伦多大学做出来的大型CNN,将错误率降到了15%。他们是第一个正式用GPU跑这么大的CNN的团队。
于是,突然之间,整个计算机视觉领域都开始使用这项技术。我从来没见过一个研究领域如此快速地从一种技术转向另一种。
其实就在2011年,我们还提交了一篇论文到CVPR。这篇论文打败了当时最好的记录,但是却被拒了。因为那个时候人们都不相信CNN能取得这么好的成绩。因为大家没见过,于是,他们就主观臆断地认为我们犯规了之类的。
但是3年之后,世道完全反过来了。你不用CNN,文章都不可能被接收。
不过这也不是一件好事。因为这样会灭杀多样性。讲这件事是想让大家知道,这在当时是一个多么重大的革命。
这些网络都特别大,有上百万个按钮、单元和权重。网络的第一层检测的都是一些基本motif,比如边缘、线条等等。
有的CNN多达50层,甚至更多。为什么我们需要这么多层?
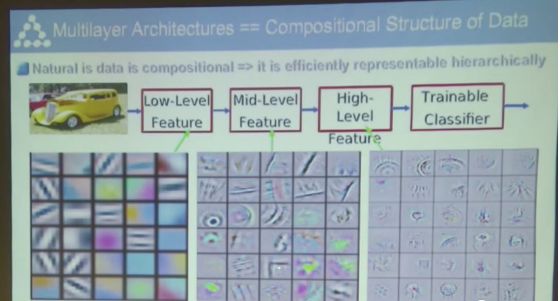
神经网络的多层架构对应着数据的组成型结构,不同层检测不同的特征,比如线条、边缘等底层特征,圆圈、弧线、角等中层特征,更接近图形的高层特征。
这个世界的所有事物呈现都是分层的。比如文本,就是从字母,字,词,从句,句子,段落组成的。
爱因斯坦曾经说过,这个世界最不可思议的事,是所有东西都是可以被理解的。
世界上最令人费解的事情是,世界是可以理解的。
过去几年大量的公司做了很多努力,让这些技术落地,并规模化。
开始列举最近各种研究进展
比如说,我们现在用256个CNN,1小时就能完成在整个ImageNet上的训练,错误率达到23.74。
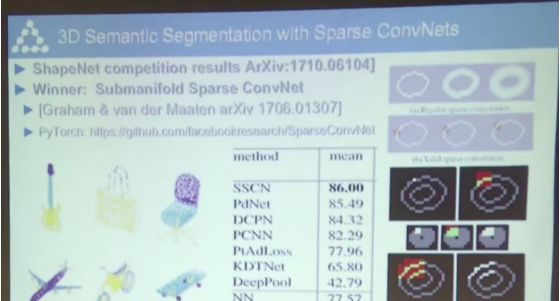
计算机视觉的最前沿研究Mask R-CNN,可以做物体分割,关键点检测,人体姿态捕捉等等。用Sparse ConvNet还可以做3D语义分割——
另外,CNN还能用在和视觉没什么关系的领域,比如做翻译。这对于Facebook来说很有用,帮助用户翻译短篇的文章。
今天分享提到的很多资料,都是开源的。
卷积神经网络可以应用在很多领域,比如在无人驾驶上,可以帮机器用视觉感知环境。在医学影像、基因学、物理学等等各种领域都有应用,而且几乎每天都有新的落地领域出现。
深度学习不仅能感知,还能推理。
比如说,我们可以根据一张图片,提出问题,
下图中方块的数量比黄色的物体多吗?
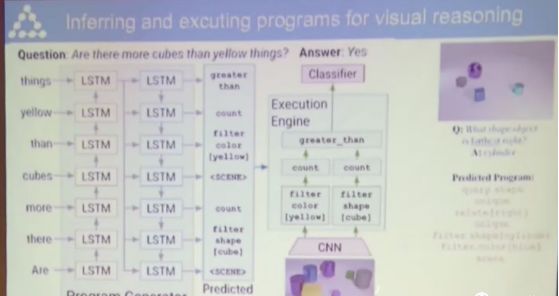
如果是人类来回答这个问题,需要分别数一数方块和黄色物体的数量,然后比较这两个数量的大小。
对于神经网络来说,就需要一个模块来分类出方块和黄色物体,另一个模块来数数,还需要一个模块比较大小给出答案。
这个神经网络是动态的会随着输入的变化而变化,输入会决定神经网络的架构。
另外,用记忆模块来增强神经网络也是一个很有意思的研究方向。
在讲座中,立昆老师又提到了他最近推崇的可微分编程。感兴趣的同学可以阅读之前的文章,以及自行看视频。
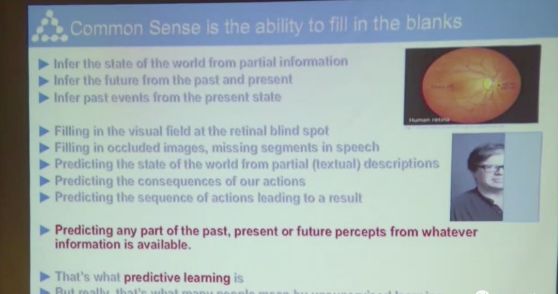
最后,立昆老师还强调了一点:目前,机器并没有通用的智能,也没有尝常识。
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。由互联网进化论作者,计算机博士刘锋与中国科学院虚拟经济与数据科学研究中心石勇、刘颖教授创建。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”
