[AI开发]目标跟踪之行为分析
本站寻求有缘人接手,详细了解请联系站长QQ1493399855
基于视频结构化的应用中,目标在经过跟踪算法后,会得到一个唯一标识和它对应的运动轨迹,利用这两个数据我们可以做一些后续工作:测速(交通类应用场景)、计数(交通类应用场景、安防类应用场景)以及行为检测(交通类应用场景、安防类应用场景)。我会写三篇文章依次介绍这三个主题。
(1)目标跟踪之速度计算
(2)目标跟踪之计数
(3)目标跟踪之行为检测
至此,三个主题都结束了。
本篇文章以交通类应用场景为例,介绍车辆异常行为分析方法。车辆异常行为通常又称“车辆异常交通事件”,指车辆在行驶道路上出现的违法行为,一般包括 停车、逆行(倒车)、占用应急车道、拥堵等等。本篇文章分别介绍这四种车辆异常交通事件的分析方法。
注意:高速交通中,通常异常交通事件还包括行人闯入、抛洒物、烟火等,由于这些跟车辆没有直接关联,本文不涉及此类事件。
(停车事件)
定位目标轨迹点
前面系列文章已经提到过,目标检测算法会输出目标的位置,一个四元组(Left、Top、Width、Height),代表一个矩形框,该矩形框住的范围就是图像中目标的位置。我们在进行目标行为分析时,需要先找到一个二维点(X,Y),使它最能代表目标在地面上的位置,原因很简单,因为画面中的目标实际是在三维世界中的地面上移动。大家可能第一反应应该选择矩形框的中心点(Left + Width / 2, Top + Height /2),虽然这个点非常好计算,但是实际应用中该点并不非常准确,通过它并不能准确地反映目标在地面上的实际位置。

如上图所示,黄色矩形框代表货车在画面中的位置,如果选取矩形框中心点来定位车辆在路面上的位置,那么货车应该在行车道(右侧车道)上行驶,而实际情况货车正在超车道(左侧车道)上。显然用这种方式去判断车辆在路面上的位置非常不准确。
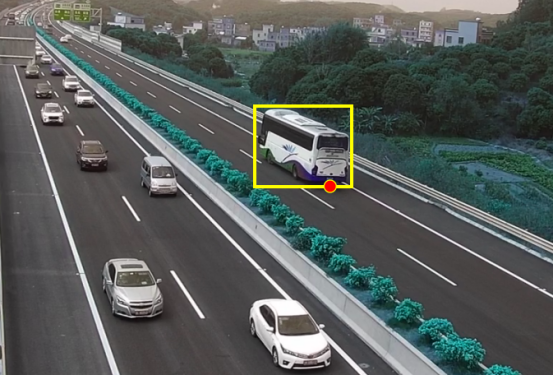
另外一种方式是选取矩形底边的中心点(Left + Width/2, Top + Height),这种方式比前一种更准确,但是当车道方向与摄像夹角非常大时,定位误差非常明显。

如上图,黄色矩形框代表客车在画面中的位置,如果选取矩形框底边中心点来定位车辆在路面上的位置,那么客车应该压线了,而实际情况客车行驶正常。
实际经验得到,只取矩形框底边中心点还不够,还需要根据车辆行驶方向与垂直方向的夹角大小来动态调整该点的X指,也就是说,最终选取的点应该是 (Left + Width/2 + delta, Top + Height),其中delta可正可负,最终的效果如下:

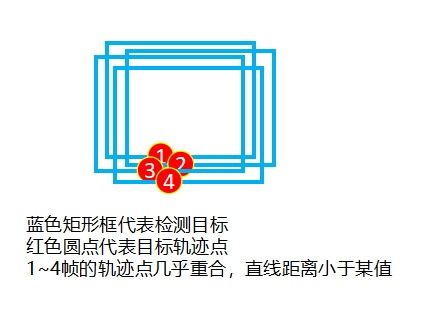
停车
停车时,目标静止不动,理论上目标轨迹点不变,我们只需要判断轨迹点在连续若干帧之内都没发生变化即可(Xm == Xn && Ym == Yn)。但现实场景中,由于目标检测算法的准确性,同一个目标即使静止不动,每一帧检测到的矩形框也有可能不一样(位置不同、大小不同等),最后得到的轨迹点也不会重合。因此更好的判断方式是:目标轨迹点连续若干帧之内欧氏距离(平面直线距离)不大于某值,比如50像素,那么我们即可认为车辆静止不动(停车事件发生)。
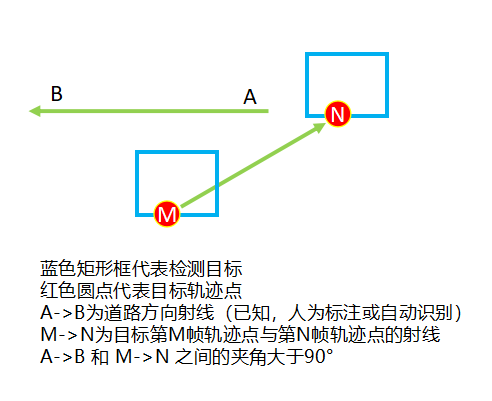
逆行(倒车)
逆行时,目标第M帧轨迹点和第N帧轨迹点的射线与道路方向之间的夹角如果大于某值,比如大于90°,那么判定为逆行。其中M<N
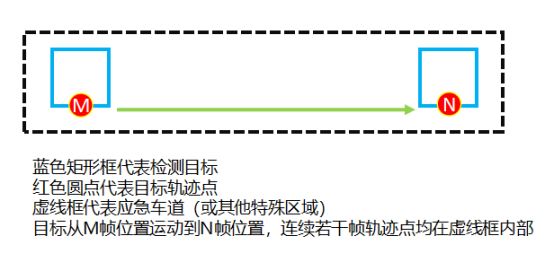
占用应急车道
当车辆行驶时,判断目标轨迹点在连续若干帧内是否都在应急车道中,若是,则为占用应急车道,其他类似的区域事件判定逻辑与这个一样
拥堵 和 缓行
连续若干帧内静止车辆数大于某值,车辆静止的逻辑可以参照前面停车的逻辑。当路面多辆车静止不动时,判定道路发生拥堵。该方式很简单,但是通常情况下,除了这种堵死的情况外,我们更需要知道是否出现缓行(提前应对拥堵发生)。
缓行有两种方式去判断:
(1)结合前几篇文章提到的测速,如果发现多辆行驶车辆的速度都小于某值(可以分级定义),那么判定道路缓行;
(2)很多情况下,车速测不出来(前面文章中有提到,没有参照物的道路测不出车速),那么我们需要使用其他方式先判断单个车辆是否缓行:在连续若干帧中,车辆轨迹点直线距离小于某值,但是大于另外一个值(保证车辆没有停止)。如果连续多帧中出现缓行的车辆数大于某值,那么判定整个道路进入缓行状态。
目标行为分析难点
前面所有的行为逻辑判断全部基于理想状态下:检测算法比较准确,矩形方框锁定目标比较稳定,不会出现丢帧、矩形框抖动严重(位置、大小跳跃厉害)。实际应用场景中,由于各种各样的因素,目标锁定不够准确,会对目标行为分析造成非常大的负面影响。
另外,上面所有判断逻辑全部基于像素单位(图像二维坐标系),这个判断依据存在一定缺陷,检测算法能检测到很远的车辆,虽然这时候车辆一直处于运动状态,但是它反应到平面二维画面上时,车辆几乎静止不动,根据前面的判断逻辑,这种情况会出现停车、拥堵等误报。避免这种误报的方式之一是尽量将摄像头斜对行车道,而不是刚好在车道的正前方/正后方。
除此之外,还有其他一些局限性,比如上面提到的各种阈值的调整,也是非常考验人的一项工作。一般视频分析应用很难同时满足多个场景,针对不同的需求最好做一些特定的优化。