桁架机器人运动视频_桁架机器人的直线定位单元
本站寻求有缘人接手,详细了解请联系站长QQ1493399855
 戳上面的蓝字关注我们哦!
戳上面的蓝字关注我们哦!
CUBIC 直线定位单元是桁架机器人核心元件。为了降低桁架式机器人的成本,缩短产品的研发周期,增加产品的可靠性、提高产品性能,机器人制造商已将桁架机器人模块化,而直线定位单元(系统)则是模块化的最典型的产品。
一个完整的定位单元(系统)由几部分组成?
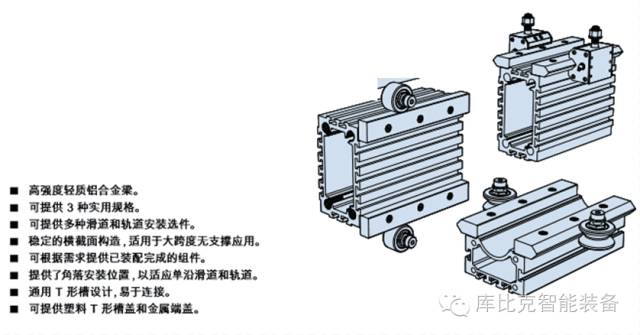
1、定位体型材:作为轨道的安装支撑部分,该型材不同于一般的框架型材,它要求非常高的直线度和平面度。

2、运动轨道:安装在定位体型材上,直接支撑运动的滑块。一个定位体型材(系统)上,可能安装一根运动轨道,也可能安装多根运动轨道,轨道的特性及数量直接影响定位单元(系统)的力学特性。组成定位系统的轨道种类很,通用的有直线滚珠轨道,直线圆柱钢轨道。
3、运动滑块:由负载安装板、轴承架、滚轮组(滚珠组)、除尘刷、润滑腔、密封盖组成。运动滑块与轨道通过滚轮或滚珠藕合在一起,实现运动的导向。
4、传动元件:通用的传动元件有同步带、齿形带、丝杠/滚珠丝杠、齿条、直线电机等。
5、轴承及轴承座:用于安装传动元件及驱动元。